Sensors, Free Full-Text
Por um escritor misterioso
Last updated 02 novembro 2024
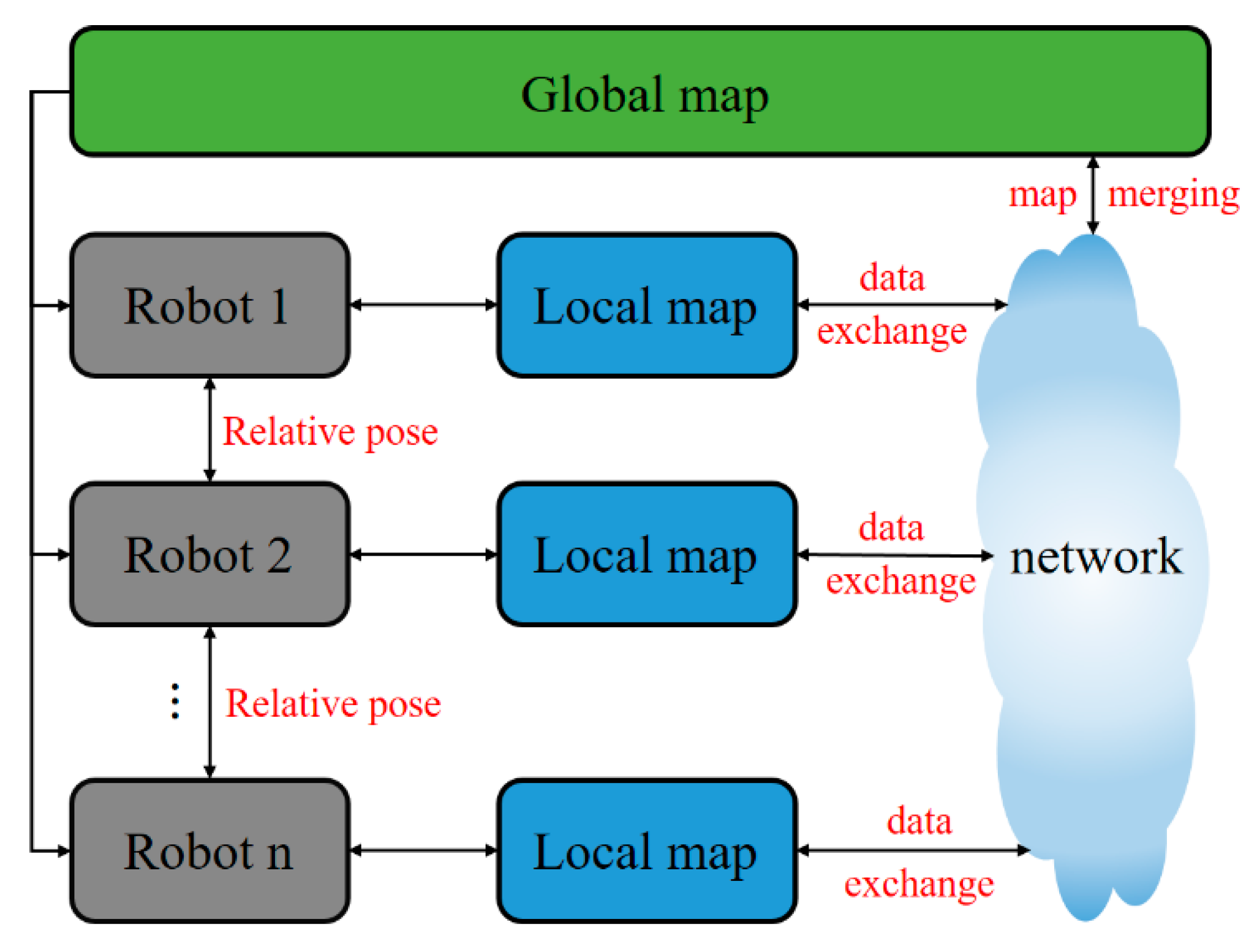
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.
Sensors, Free Full-Text

ESPHome — ESPHome
100us PNP Output Easy Setting Digital Fiber Optic Amplifier
Freestyle Libre 2 Sensor $160.93/Each Modern Medical Products

Bosch 0261230093 Original Equipment Fuel Pressure

Freestyle Libre Troubleshooting: Sensor Error Reading Not

buy Bosch Fuel Pressure Sensor 0261230093 3F2Z9G756AA for Ford E

Food Frontiers - Wiley Online Library
WTB4FP-32161120A00 - W4

IMS Solution Zone Water Detection Sensor

Bosch 0261230093 Original Equipment Fuel Pressure
Recomendado para você
-
Família Eduarda Ferrão - Aqui na minha cidade está chovendo 🌧 e02 novembro 2024
-
 VENCI O DESAFIO NO CORRIDOR OF HELL02 novembro 2024
VENCI O DESAFIO NO CORRIDOR OF HELL02 novembro 2024 -
ferrão tiltando o bkinho kkkkk #grotarp #fivemrp #complexorp02 novembro 2024
-
 MINECRAFT #22. PRIMEIRAS CONSTRUÇÕES DA NOSSA NOVA CIDADE MODERNA02 novembro 2024
MINECRAFT #22. PRIMEIRAS CONSTRUÇÕES DA NOSSA NOVA CIDADE MODERNA02 novembro 2024 -
 Duda Ferrão Games02 novembro 2024
Duda Ferrão Games02 novembro 2024 -
chika gadando os civil #fivemrp #grotarp #complexorp @_02 novembro 2024
-
 MINECRAFT #31 - CONSTRUÍMOS SHOPPING CENTER, BURGER KING02 novembro 2024
MINECRAFT #31 - CONSTRUÍMOS SHOPPING CENTER, BURGER KING02 novembro 2024 -
 Notícias da UFSC02 novembro 2024
Notícias da UFSC02 novembro 2024 -
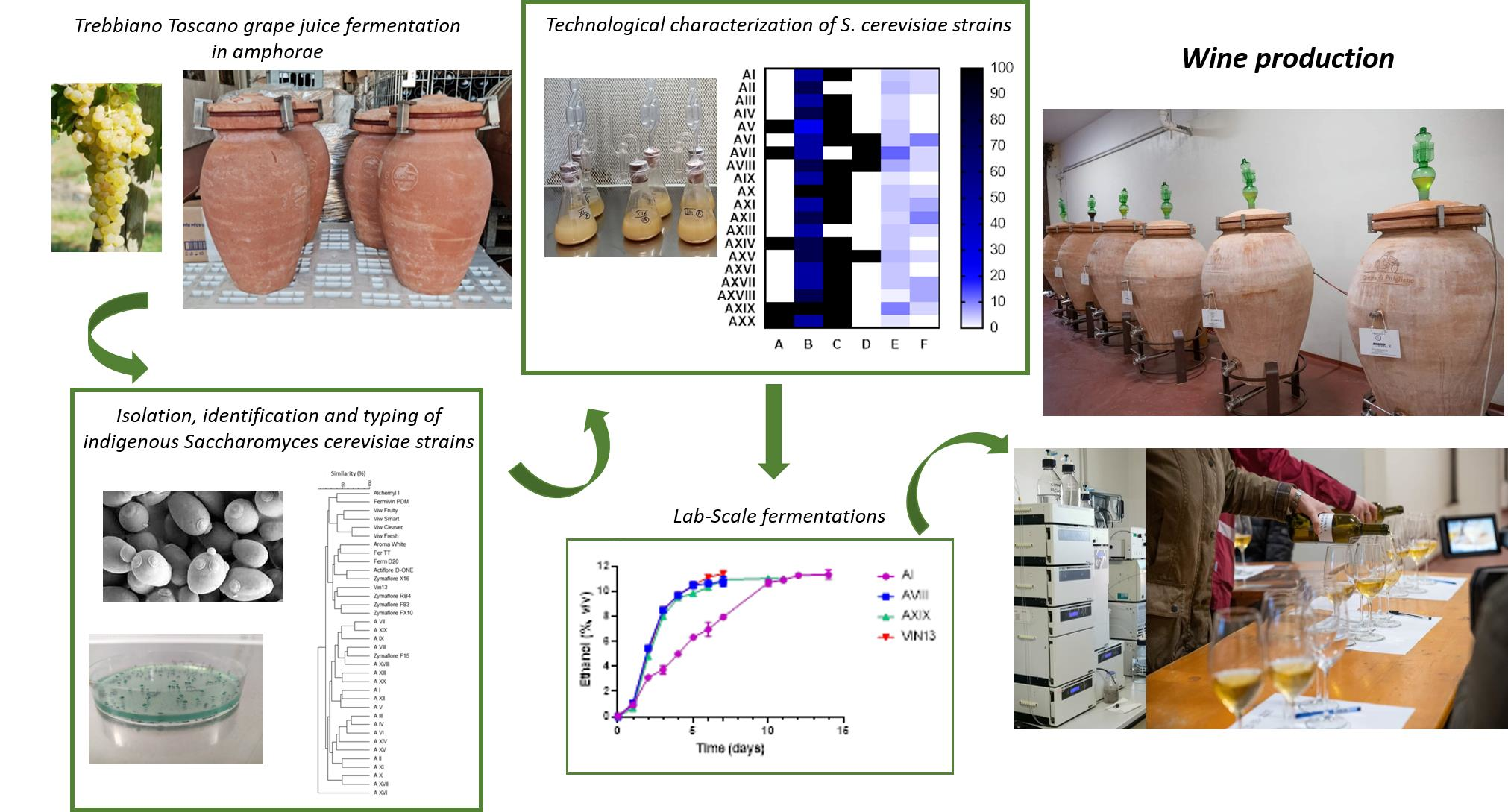 Foods, Free Full-Text02 novembro 2024
Foods, Free Full-Text02 novembro 2024 -
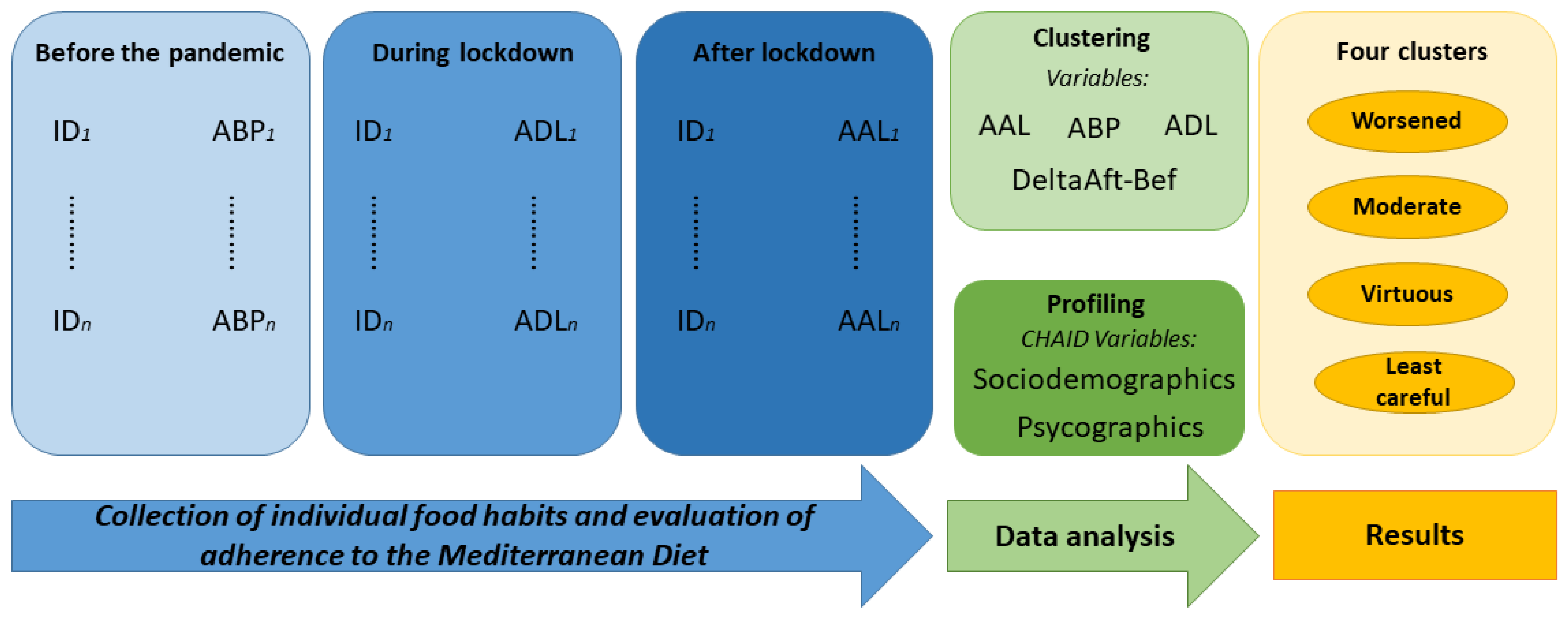 Sustainability, Free Full-Text02 novembro 2024
Sustainability, Free Full-Text02 novembro 2024



você pode gostar
-
 i am my mothers savage daughter original lyrics|TikTok Search02 novembro 2024
i am my mothers savage daughter original lyrics|TikTok Search02 novembro 2024 -
 Andor: Segunda temporada da série de Star Wars terá o retorno de Forest Whitaker02 novembro 2024
Andor: Segunda temporada da série de Star Wars terá o retorno de Forest Whitaker02 novembro 2024 -
Key & BPM for Memoriam by Eleine02 novembro 2024
-
 Bethesda West Hospital02 novembro 2024
Bethesda West Hospital02 novembro 2024 -
 JOGO DE XADREZ MADEIRA MACIÇA TABULEIRO ESTOJO MARCHETADO REI 08 CM02 novembro 2024
JOGO DE XADREZ MADEIRA MACIÇA TABULEIRO ESTOJO MARCHETADO REI 08 CM02 novembro 2024 -
 Roblox memes on X: Caption this: #Roblox #RobloxMemes #Memes / X02 novembro 2024
Roblox memes on X: Caption this: #Roblox #RobloxMemes #Memes / X02 novembro 2024 -
 FGV-SP 2014 Economia - Manhã questão 69 - Estuda.com ENEM02 novembro 2024
FGV-SP 2014 Economia - Manhã questão 69 - Estuda.com ENEM02 novembro 2024 -
 NVIDIA GeForce GPUs Continue To Dominate Linux Gaming Benchmarks, AMD Radeon & Intel Arc Left Catching The Dust02 novembro 2024
NVIDIA GeForce GPUs Continue To Dominate Linux Gaming Benchmarks, AMD Radeon & Intel Arc Left Catching The Dust02 novembro 2024 -
Suporte Rei - Catálogo – Apps no Google Play02 novembro 2024
-
 Every PSone CLASSICS game on the PlayStation Store (EU)02 novembro 2024
Every PSone CLASSICS game on the PlayStation Store (EU)02 novembro 2024

